Не рекомендую использовать нижепредставленное для каких либо целей отличных от ознакомительных.
Состав основной платы,
| SoC | AT91RM9200-QU-002 | ARM920T, MMU, 200 MIPS at 180 MHz, 16K Data Cache, 16K Instruction Cach, Supports SDRAM, Ethernet MAC 10/100 Base-T, USB 2.0 Full Speed Host, Multimedia Card Interface |
| SDRAM | MT48LC16M16A2P-75 | 16-Bit, 4-Meg x 4-banks, x2 |
| FLASH | AT45DB081D-SU | 8-megabit SPI DataFlash |
| RESET | MAX6390XS29D4+T | Low-Power Reset Circuit |
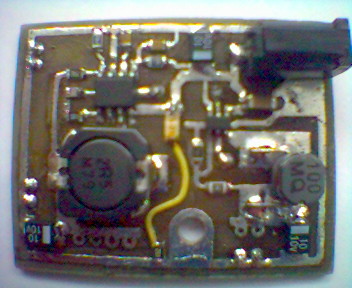
Блок питания,
| STEP-DOWN | MAX1920EUT | Low-Voltage, 400mA, DC-DC Converter |
| STEP-DOWN | MAX1951ESA | 1MHz, All-Ceramic, 2A PWM DC-DC Regulator |
Дисплей,
| LCD | Nokia 6100 | 130x130 pixels, 12-bit color, PCF8833 Controller |
| INVERTER | LM828M5 | Switched Capacitor Voltage Converter |
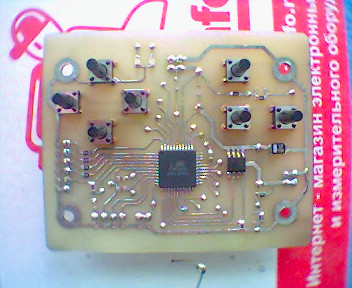
Клавиатура,
| MCU | ATmega16 | Advanced RISC Architecture, 16K Flash, 1K SRAM, Up to 16 MIPS |
| MOSFET | IRF7314 | Dual P-Channel MOSFET, Ultra Low On-Resistance |
Теперь картинки. Для начала наброски схемы основной платы, хотя нет, смотрите лучше EK от Atmel, чего одно и тоже перерисовывать.
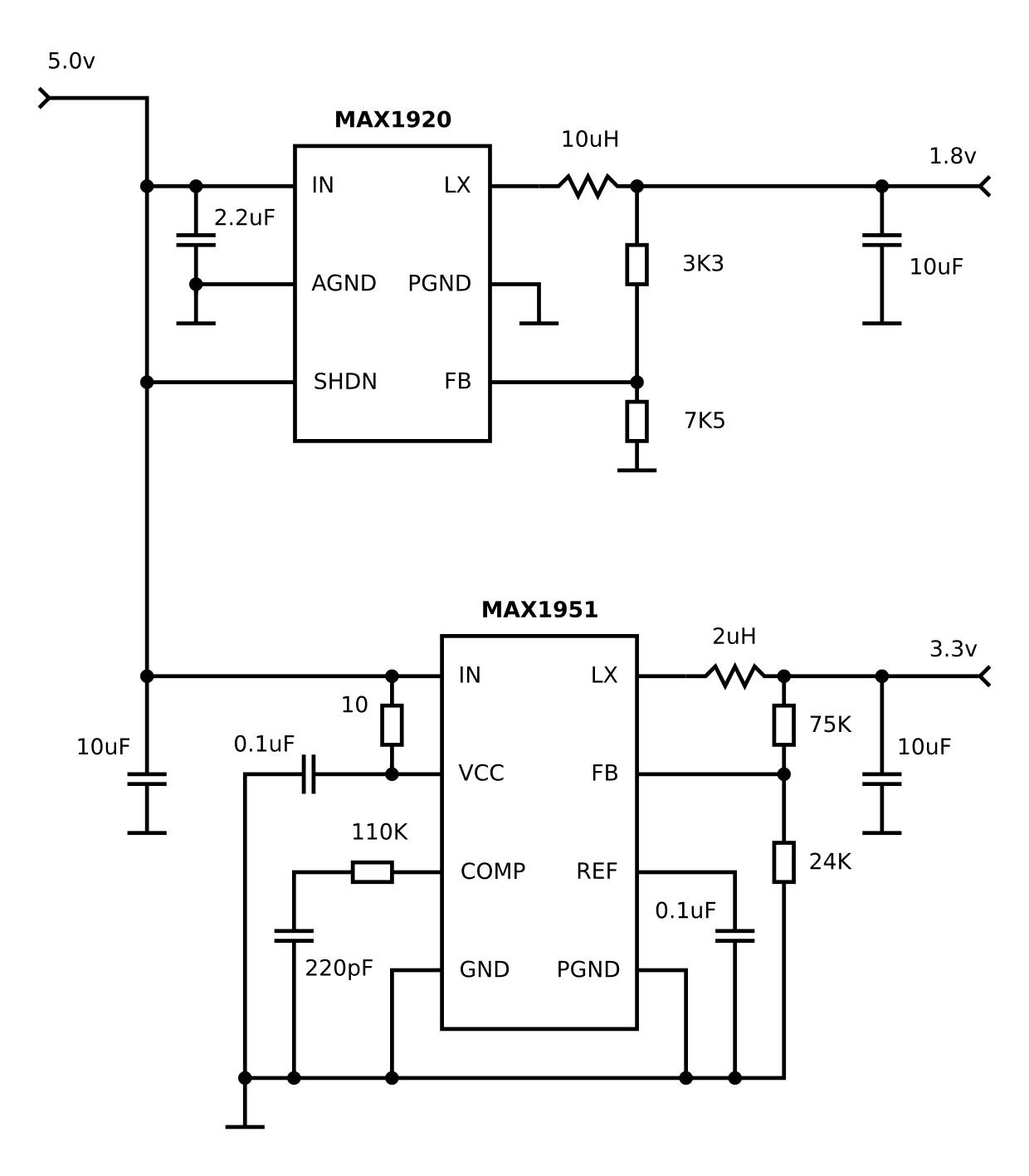
Начнем лучше с платы блока питания, итак, копипаста из даташитов,
Схема, pow1833.png
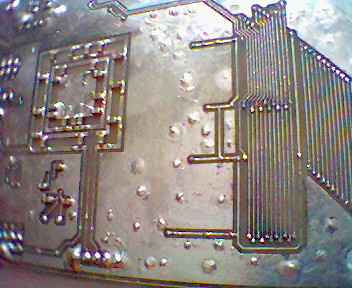
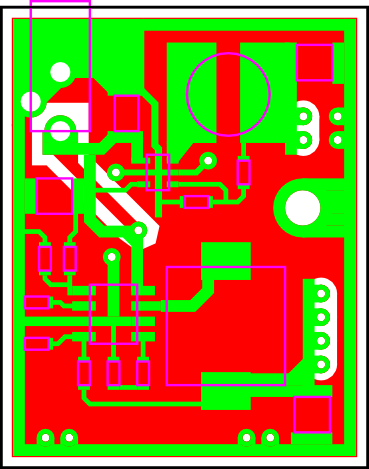
Плата, pow1833_b.png
Фото,

Дисплей, здесь схемы нет, она слишком простая, распиновка дисплея есть, инвертор включен по стандартной схеме,
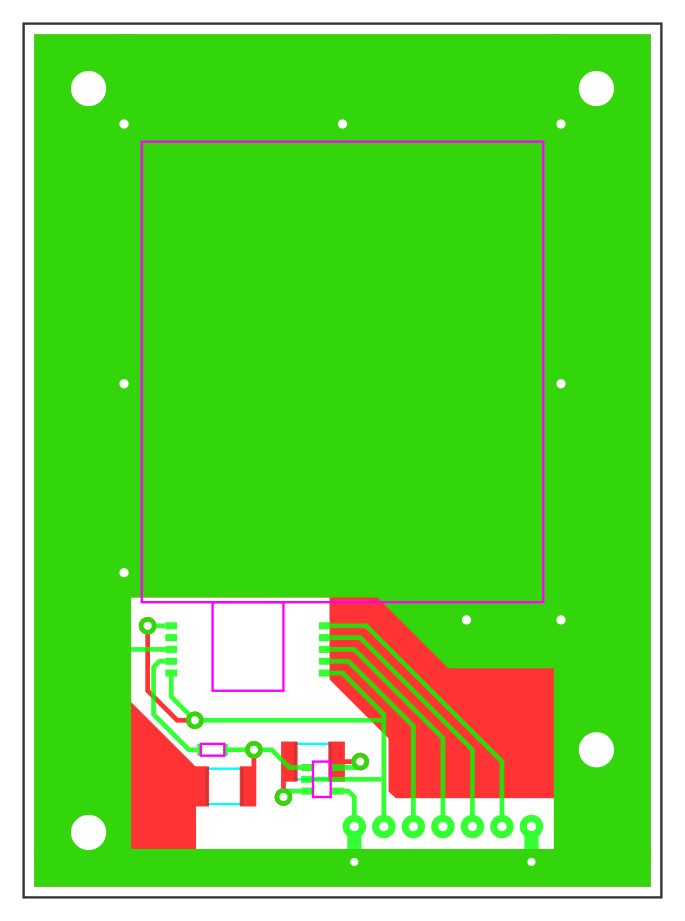
Плата, noklcd_b.png
Фото,

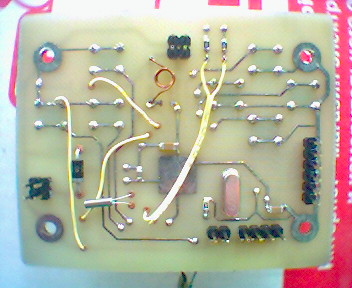
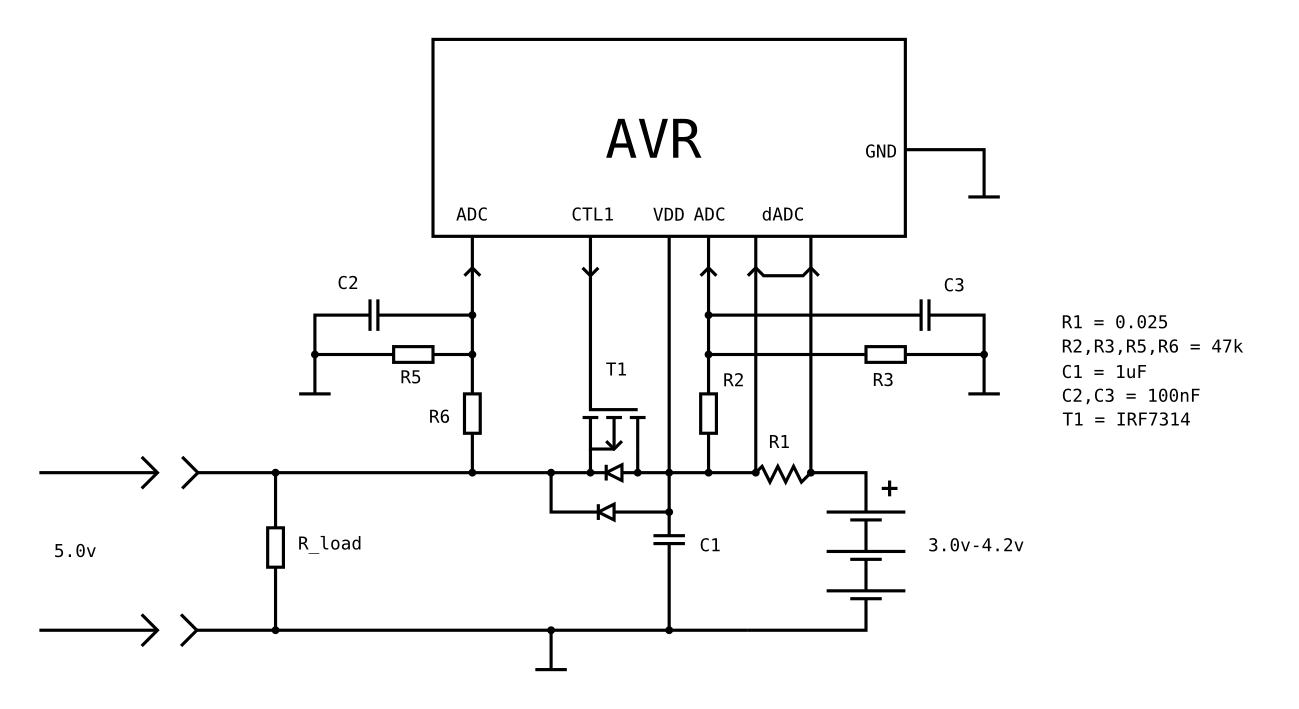
Клавиатура, оно же дополнение к блоку питания, система зарядки и разрядки аккумуляторов, и часы реального времени,
Часть схемы, powch.png
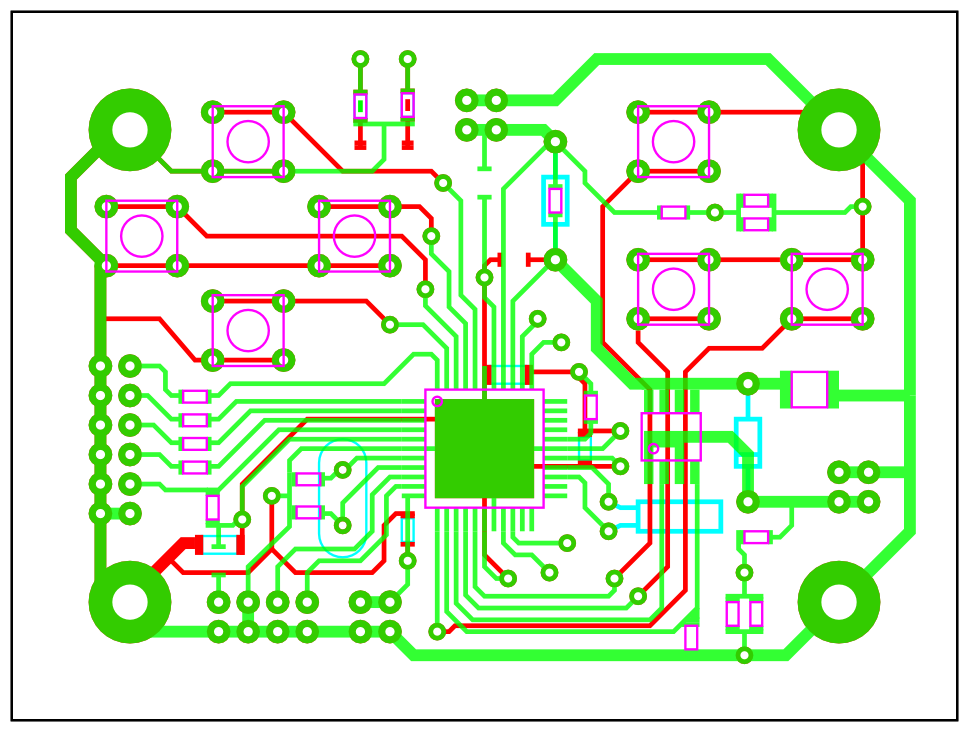
Плата, powch_b.png
Фото,
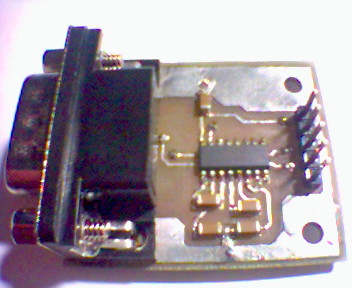
Преобразователь UART <--> RS232, схема и плата тривиальны, использован MAX3232,
Фото,

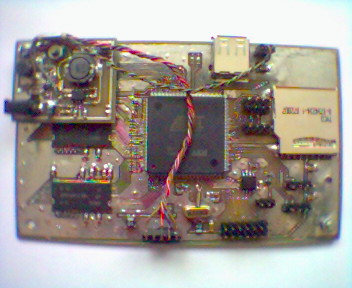
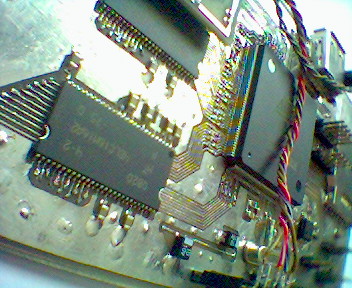
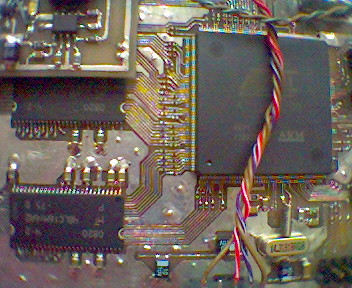
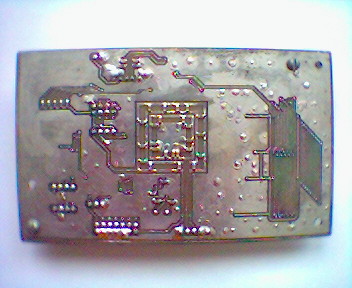
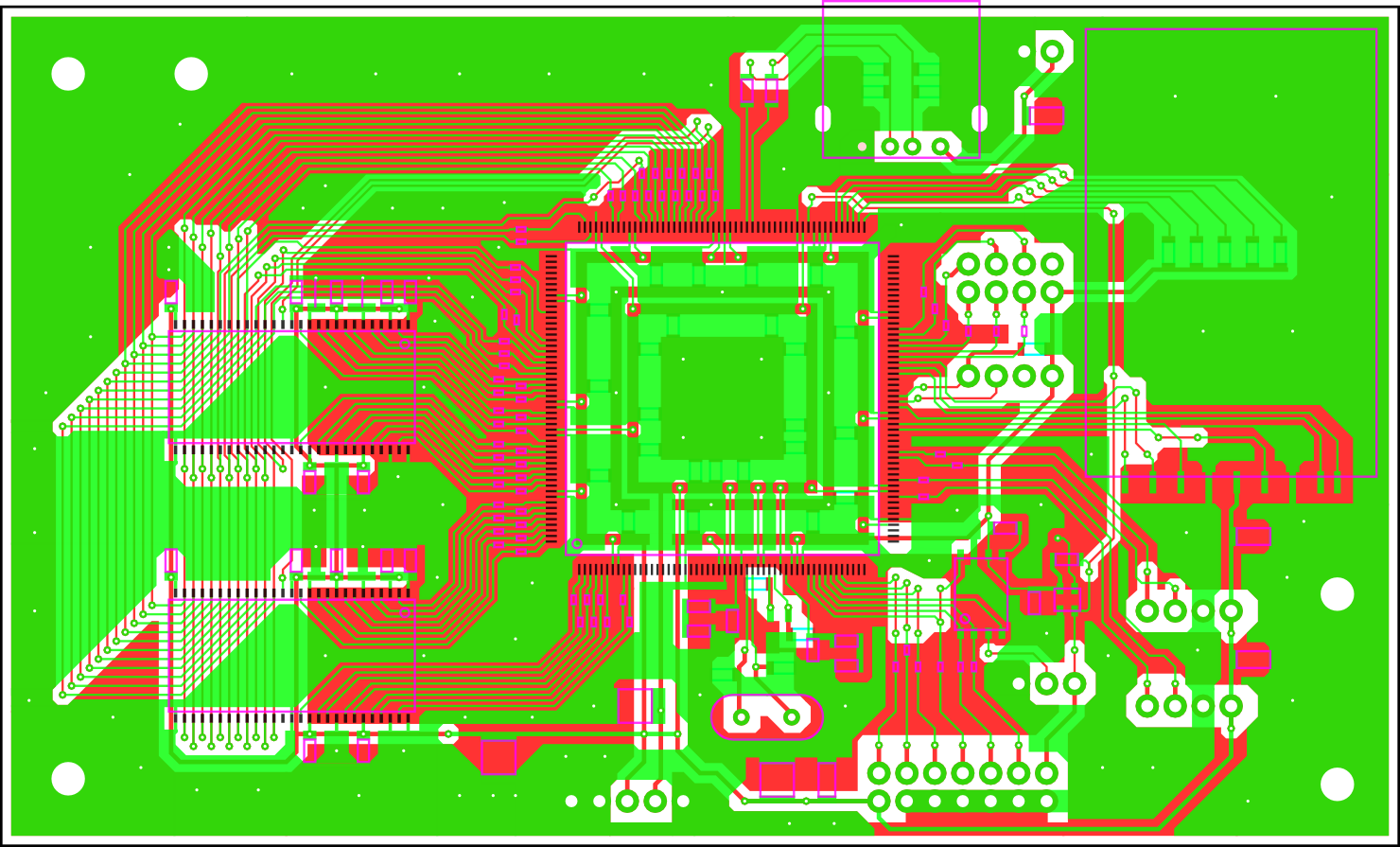
Основная плата, в разводке есть мелкие ошибки, и как оказалось одних лишь танталовых конденсаторов мало, супервизор питания делает RESET слишком рано, видимо из-за просадок питания, позже был добавлен алюминиевый конденсатор в навес, проблема ушла,
Плата, at91_b.png
Фото,
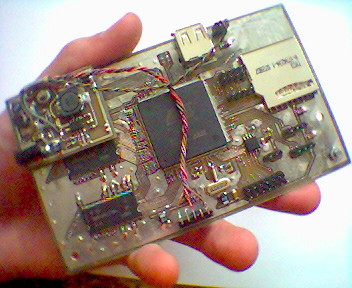
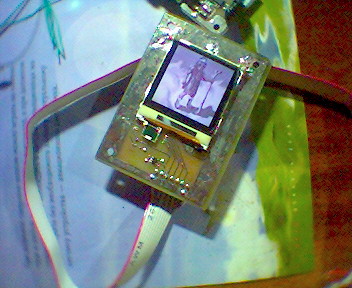
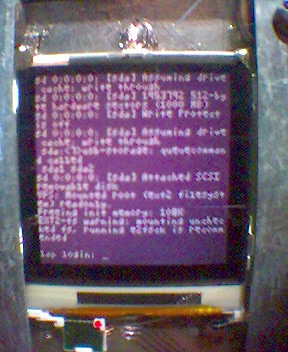
Готовое устройство,


Можно гра^W играться в NES игры, но быстро надоедает, для остального же дисплей слишком мелкий.
| Tags: [arm, at91] | 2009-10-19 22:35 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}